

对于交通工具来说,有一样属性非常重要,那就是通过性。
一般来说,使用充气橡胶轮胎的普通轿车能够以足够高的平均车速通过较为平整的道路,但如果要翻越路况非常差的山路,那就只有高马力、配备专用越野轮胎的越野汽车才能做到。至于根本没路的地方,恐怕只有履带车才能开出一条路来。但履带车最大的缺点是非常的笨拙,转弯非常困难。
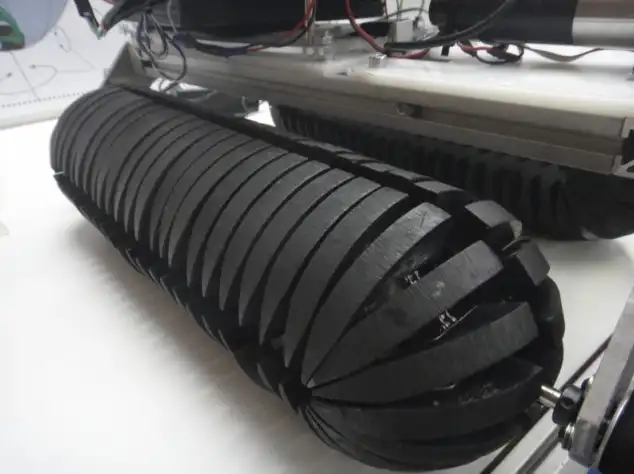
而日本大阪大学(Osaka University)开发出一种以电池为动力、可以远程操控的全方位履带车(Omni-Crawler),则打破了履带车固有缺点:侧向移动困难。

Omni-Crawler使用了同样由大阪大学团队开发的一种球形万向轮Omni ball,由两个同样大小的半球组成,由一根短轴连接,并且这两个半球可以分别转动,也可以当做一个完整的球来移动。
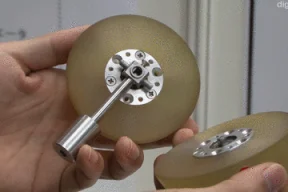
车体上的两条圆形履带都由由这样的球形万向轮组成,用马达控制短轴,用于操控球体的转动,从而控制前进方向。

球状轮运行模拟
Omni-Crawler作为一种履带车,也同样有着可以轻易翻越障碍的特点。
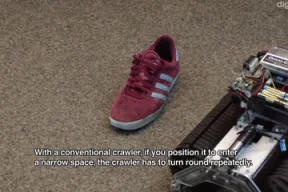
传统履带车在遇到无法跨越的障碍物或狭小的空间时需要多次调整方向才能通过,而Omni-Crawler则可以进行左右移动定位,并且转弯时的能量损失比较大,因此只需要简单调整便可轻松转向的Omni-Crawler性能上更为优秀。除此之外,传统履带车在柔软地面上行进时边缘会陷入,特别是车身需要侧向移动时,而圆形履带可以完美的克服这一点。

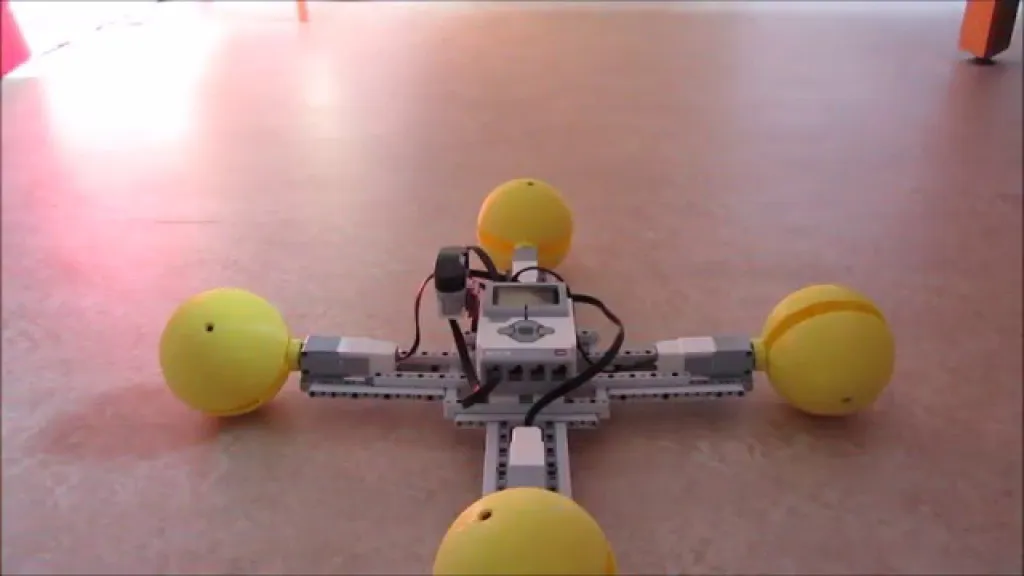
Omni ball除了可以应用在履带车上,也可以单独使用。根据大阪大学的研究人员的介绍,只需要3个Omni ball组合使用就能使被移动物体产生各个方向的推动力。
虽然Omni-Crawler外形看起来圆滚滚,但却十分灵活。如果将Omni ball的技术实用化,运用到更多的领域内,例如取代四轮电动滑板的车轮,会变成滑板也能左右漂移,那样也是十分有趣。你又觉得这样的设计能用到什么地方呢?
下一篇我们会继续为大家带来其他全向轮产品的信息。
延伸阅读:全向轮系列第一期:360°全向轮技术,会是未来的风口吗?



